Research Goal: Construct a robotic “Digital Gene” worldview by modeling “Structure-Function-Execution” as analytic programs to achieve embodeid agent for robots.
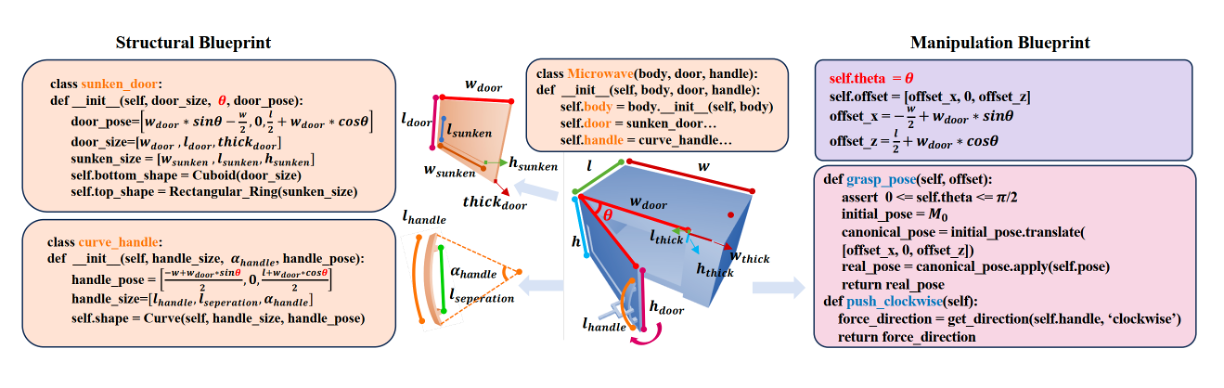
Analytic Concept-Driven Agent (AC-Agent): Explicitly mapped unstructured vision to parametric geometric primitives and kinematic chains, enabling precise alignment between high-level logic and low-level control for long-horizon task stability.
Analytic-Constrained VLA Fine-tuning (AC-VLA): Introduced physical manifold constraints and explicit reward guidance into action spaces via analytic concepts, incorporating 3D priors for efficient VLA policy fine-tuning.
Physically Evolved Reward Model (AC-Reward): Developed intrinsic dense rewards by evolving analytic parameters through the Eureka pipeline.
Analytic World Model (AC-WM): Built an analytic kinematic world model with physical skeletons to enhance object-centric state prediction and explicit reward calculation, providing a stable symbolic environment for Offline Model Based RL.